cv::align not optimized (windows 10, C++) #2376
Comments
|
@dorodnic
so visually it seems to be better than v2.15.0, and if no changes with rs2::align between 2.15 & 2.16 then the improvement might come from the openmp = TRUE; |

|
[Realsense Customer Engineering Team Comment] |
|
I actually get pretty bad FPS too running this example.. maybe about 10FPS? |
|
Hello @HippoEug , |
|
I have tried it and there is indeed better FPS now. |
|
[Realsense Customer Engineering Team Comment] |
|
@RealSense-Customer-Engineering Will do as long as I've tried it. If the new release version is using CUDA, I'm sure it's going to be better than the previous openMP one. |
Issue Description
CPU: i5-8400
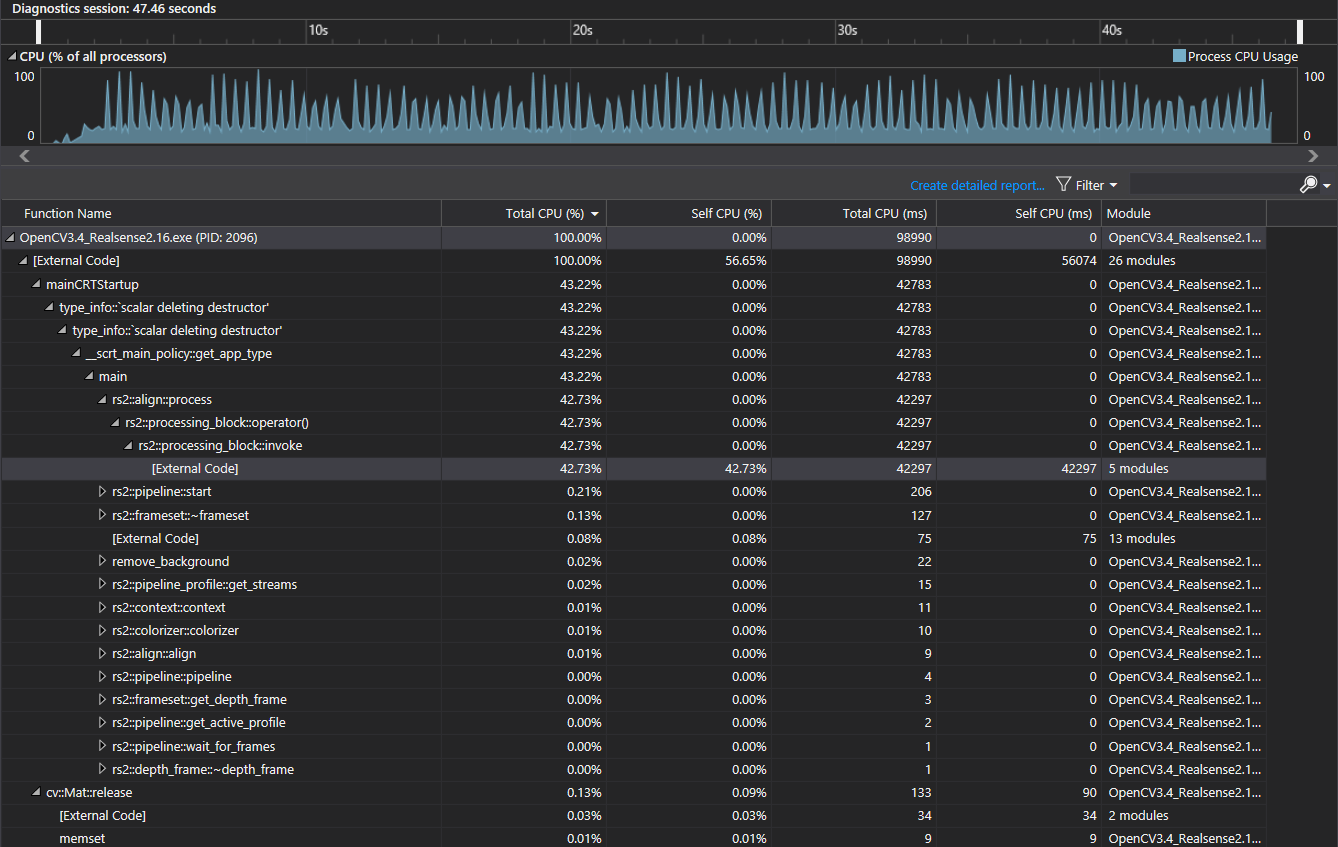
As described in #2321, aligning function slow down overall performance. I checked the 2.16.0 pre-release note, and haven't found any update regarding the align function yet.
(Don't worry about the project name, I'm using v2.15.0)
I modify few lines of code from the example code . To use cv::imshow to show the result, and the rest are basically the same. Code shown below:
The text was updated successfully, but these errors were encountered: