Adding Documentation for Sensors with different Thruster Configuration #31
Comments
|
Original comment by Brian Bingham (Bitbucket: brian_bingham). Raymond, Thank you for the note. Have you tried the tutorial - https://osrf-migration.github.io/vrx-gh-pages/#!/osrf/vmrc/wiki/tutorials/PropulsionConfiguration ? If I run the two examples ... I see the different thruster/propulsion configurations without making any changes to the xacro files. If you are still experiencing the issue, can you make sure you have updated the local repository - and that you are working from the default branch? Lastly, the xacro processing should be done for you with Let us know. |
|
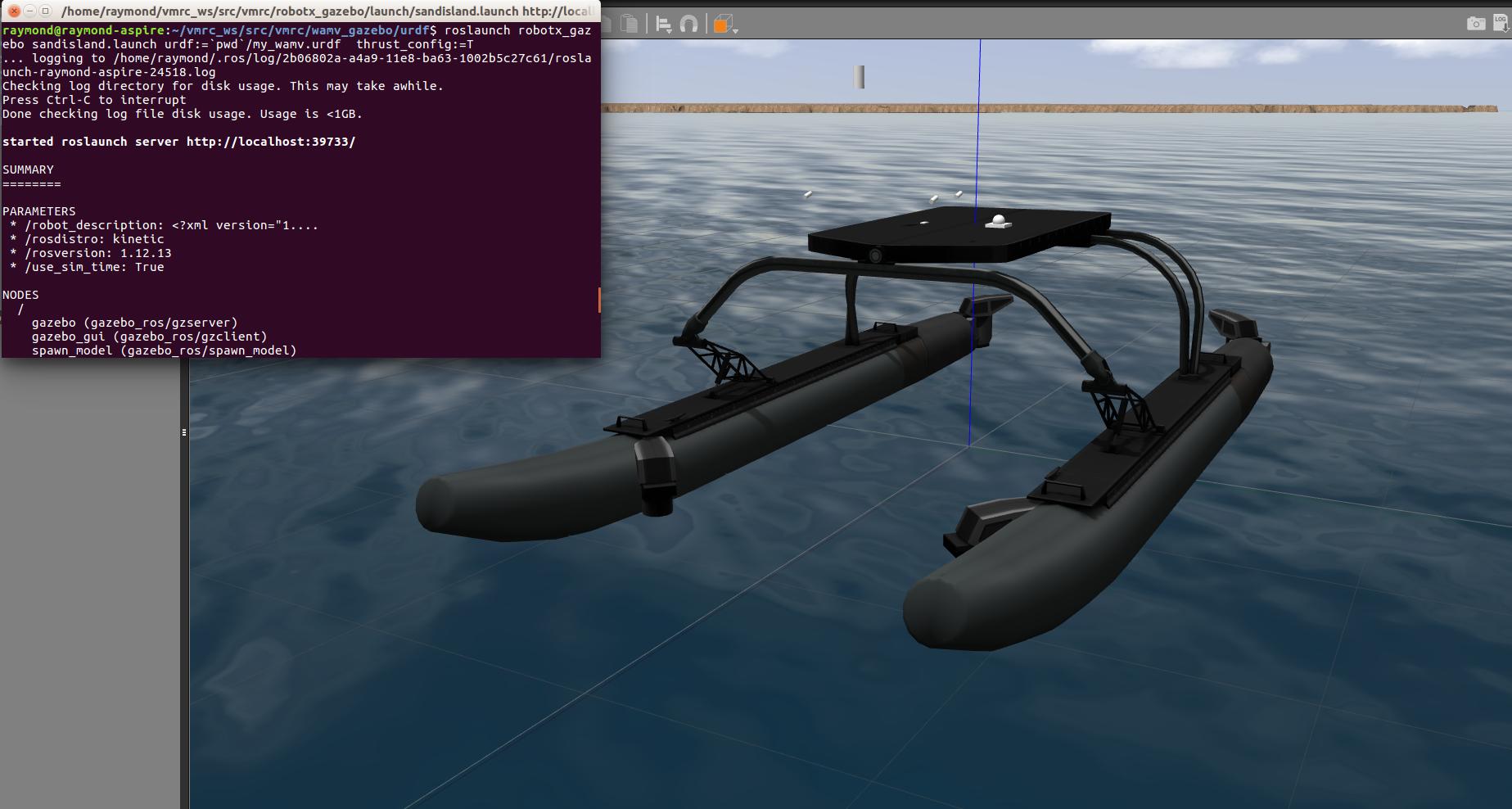
Original comment by Raymond Andrade (Bitbucket: 808brick). Hey Brian, runs correctly, but when I try to add the sensors urdf file to the thruster configuration: Then the simulation will revert back to default "H" thruster configuration regardless, unless you edit wamv_gazebo.urdf.xacro like I mentioned above. Next time I will see if I can just use catkin_make to avoid needing to run the rosrun xacro command. Here is a screenshot to illustrate. My wamv_gazebo.urdf.xacro is set with thruster_configuration "X", so even though I start the simulation as: It will still load the "X" thruster configuration. Again this only happens when adding the sensor urdf. |
|
Original comment by Brian Bingham (Bitbucket: brian_bingham). Raymond, Thanks for the thorough explanation - I'm tracking now. I updated the tutorial instructions, adding a bit at the end on how to access the propulsion/thruster configurations. The more verbose wamv_gazebo_sensors.urdf.xacro is part of PR#45. The thrust_config argument is used by the sandisland.launch file to specify a particular urdf file, so specifying the urdf explicitly conflicts. It is confusing. Let us know if the updates work for you and we'll merge it into the default. |
|
Original comment by Brian Bingham (Bitbucket: brian_bingham). I'm assuming this worked, so resolving for now. |
|
Original comment by Brian Bingham (Bitbucket: brian_bingham).
|
Original report (archived issue) by Raymond Andrade (Bitbucket: 808brick).
Hey All, thanks for the great work on the simulation. I just wanted to point out that there was no documentation for utilizing sensors with different thruster configurations. When running:
It will run the simulation with the sensors, but the thrust configuration will remain as the default "H" Layout.
To change this I had to edit wamv_gazebo.urdf.xacro so that the line:
instead reads:
and then converting the xacro to urdf by:
Only after doing this will the command:
work as expected
If this documentation was added to the tutorials I think that would help others who are trying to utilize the sensors with the different thrust configurations.
The text was updated successfully, but these errors were encountered: