Alex Yu*, Sara Fridovich-Keil*, Matthew Tancik, Qinhong Chen, Benjamin Recht, Angjoo Kanazawa
UC Berkeley
Website and video: https://alexyu.net/plenoxels
arXiv: https://arxiv.org/abs/2112.05131
Note: This is a preliminary release. We have not carefully tested everything, but feel that it would be better to first put the code out there.
Also, despite the name, it's not strictly intended to be a successor of svox
Citation:
@misc{yu2021plenoxels,
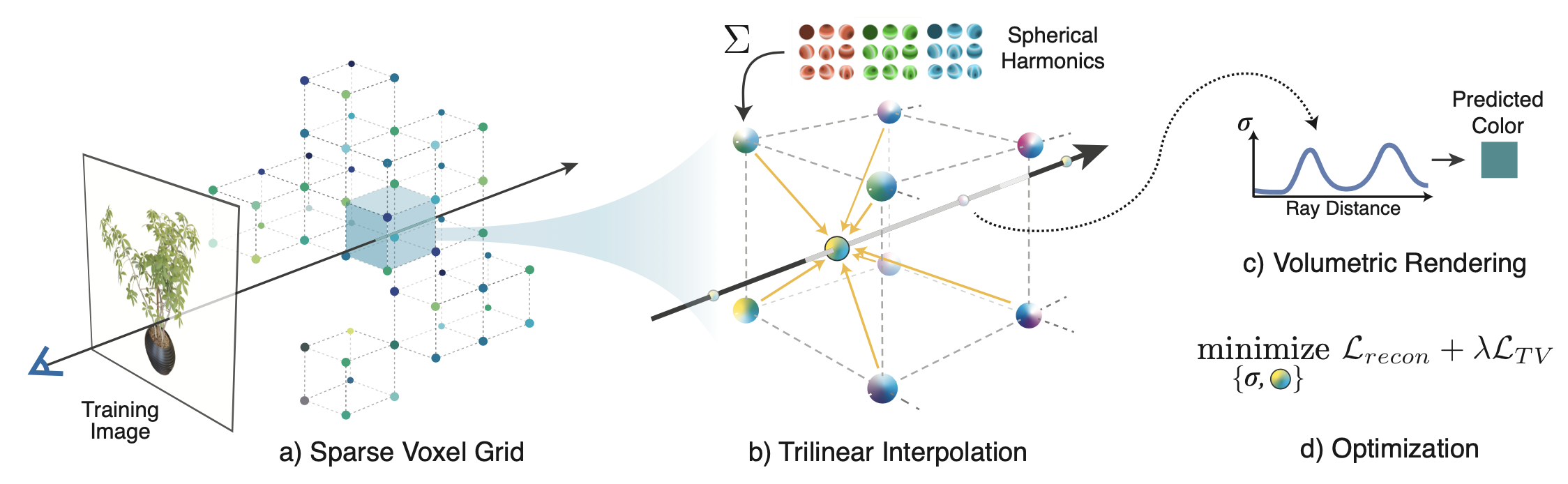
title={Plenoxels: Radiance Fields without Neural Networks},
author={{Alex Yu and Sara Fridovich-Keil} and Matthew Tancik and Qinhong Chen and Benjamin Recht and Angjoo Kanazawa},
year={2021},
eprint={2112.05131},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
This contains the official optimization code. A JAX implementation is also available at https://github.com/sarafridov/plenoxels. However, note that the JAX version is currently feature-limited, running in about 1 hour per epoch and only supporting bounded scenes (at present).
First create the virtualenv; we recommend using conda:
conda env create -f environment.yml
conda activate plenoxelThen clone the repo and install the library at the root (svox2), which includes a CUDA extension.
If your CUDA toolkit is older than 11, then you will need to install CUB as follows:
conda install -c bottler nvidiacub.
Since CUDA 11, CUB is shipped with the toolkit.
To install the main library, simply run
pip install .
In the repo root directory.
We have backends for NeRF-Blender, LLFF, NSVF, and CO3D dataset formats, and the dataset will be auto-detected.
Please get the NeRF-synthetic and LLFF datasets from:
https://drive.google.com/drive/folders/128yBriW1IG_3NJ5Rp7APSTZsJqdJdfc1
(nerf_synthetic.zip and nerf_llff_data.zip).
We provide a processed Tanks and temples dataset (with background) in NSVF format at: https://drive.google.com/file/d/1PD4oTP4F8jTtpjd_AQjCsL4h8iYFCyvO/view?usp=sharing
Note this data should be identical to that in NeRF++
Finally, the real Lego capture can be downloaded from: https://drive.google.com/file/d/1PG-KllCv4vSRPO7n5lpBjyTjlUyT8Nag/view?usp=sharing
For training a single scene, see opt/opt.py. The launch script makes this easier.
Inside opt/, run
./launch.sh <exp_name> <GPU_id> <data_dir> -c <config>
Where <config> should be configs/syn.json for NeRF-synthetic scenes,
configs/llff.json
for forward-facing scenes, and
configs/tnt.json for tanks and temples scenes, for example.
The dataset format will be auto-detected from data_dir.
Checkpoints will be in ckpt/exp_name.
For pretrained checkpoints please see: https://drive.google.com/drive/folders/1SOEJDw8mot7kf5viUK9XryOAmZGe_vvE?usp=sharing
Use opt/render_imgs.py
Usage,
(in opt/)
python render_imgs.py <CHECKPOINT.npz> <data_dir>
By default this saves all frames, which is very slow. Add --no_imsave to avoid this.
Use opt/render_imgs_circle.py
Usage,
(in opt/)
python render_imgs_circle.py <CHECKPOINT.npz> <data_dir>
We provide a parallel task executor based on the task manager from PlenOctrees to automatically
schedule many tasks across sets of scenes or hyperparameters.
This is used for evaluation, ablations, and hypertuning
See opt/autotune.py. Configs in opt/tasks/*.json
For example, to automatically train and eval all synthetic scenes:
you will need to change train_root and data_root in tasks/eval.json, then run:
python autotune.py -g '<space delimited GPU ids>' tasks/eval.jsonFor forward-facing scenes
python autotune.py -g '<space delimited GPU ids>' tasks/eval_ff.jsonFor Tanks and Temples scenes
python autotune.py -g '<space delimited GPU ids>' tasks/eval_tnt.jsonPlease take images all around the object and try to take images at different elevations. First make sure you have colmap installed. Then
(in opt/scripts)
bash proc_colmap.sh <img_dir>
Where <img_dir> should be a directory directly containing png/jpg images from a
normal perspective camera.
For custom datasets we adopt a data format similar to that in NSVF
https://github.com/facebookresearch/NSVF
You should be able to use this dataset directly afterwards. The format will be auto-detected.
To view the data use:
python view_data.py <img_dir>
This should launch a server at localhost:8889
Now follow the "Voxel Optimization (aka Training)" section to train:
./launch.sh <exp_name> <GPU_id> <data_dir> -c configs/custom.json
You can also try configs/custom_alt.json which has some minor differences.
You may need to tune the TV for best results.
To render a video, please see the "rendering a spiral" section.
To convert to a svox1-compatible PlenOctree (not perfect quality since interpolation is not implemented)
you can try to_svox1.py <ckpt>
You may notice that this CUDA extension takes forever to install.
A suggestion is using ninja. On Ubuntu,
install it with sudo apt install ninja-build.
Then set the environment variable MAX_JOBS to the number of CPUS to use in parallel (e.g. 12) in your shell startup script.
This will enable parallel compilation and significantly improve iteration speed.