[Merged by Bors] - Add transform hierarchy stress test #4170
Conversation
102ba9d
to
a643441
Compare
|
Personally I would like to have a home for these kinds of test examples that are useful for development. |
Seconding this: @CptPotato can you start a "stress_tests" folder in "examples" for this to live in? We can move the related benchmarky-examples into there in a follow-up PR. @james7132 @superdump ping me when you think this is ready; I can merge this in for you to help unblock more experiments. |
|
A few requests from me:
This should let us test this at varying conditions typically expected out of a game scene (mostly static? mostly moving? how deep are the mutations?) |
|
Good points @james7132. I think I'll also change the code to be more "functional" rather than trying to make it look nice. I have some ideas for how to address these things. Tough, it might take me a couple of days to get to it. |
create example folder for stress tests
a643441
to
f86556f
Compare
|
Alright, I created the I have mostly rewritten the example, ditching the focus on visuals and taking some feedback into account, there's some more info in the PR description. The branch name doesn't really fit anymore but I guess that's okay? I'm still not too sure about the configuration part. I tried making it as versatile as reasonably possible but it seems a little bloated to me. |
|
Good to hear this is on the right track. Should we include a number of preset configurations for easier and more consistent testing? cargo r --example transform_hierarchy -- 1
cargo r --example transform_hierarchy -- 2
... |
|
If we do that, it would be good if they had memorable and descriptive names. 🙂 Like max-depth (a single long chain of hierarchy for worst case), max-width (like the many_cubes — sphere case of 160k root entities with transforms), varied-depth (perhaps specifying a depth range and the branches have paths that are various lengths within that depth range to try to simulate something reasonably realistic)? |
+ ci fixes
a96974b
to
615457f
Compare
|
Sorry for the delay. I added a few test cases that can be run like this: cargo r --example transform_hierarchy -- <name>These are the setups I came up with:
I shot for ~250k to 350k entities for each of those, I think this should provide a heavy enough load. Edit: I'm thinking about removing the last two configurations (the drawing ones) and removing the related code from the example, unless somebody needs those. Rendering performance seem a little outside of what the stress test is meant for, and it might be a better fit for a separate rendering/batching stress test. |
I agree with this. |
d364787
to
0499074
Compare
|
Alright, the drawing related code is gone, I also switched to I'm fairly happy with this as it is. Let me know if I should add/change anything! |
0499074
to
8ae7e5e
Compare
|
bors r+ |
## Objective There recently was a discussion on Discord about a possible test case for stress-testing transform hierarchies. ## Solution Create a test case for stress testing transform propagation. *Edit:* I have scrapped my previous example and built something more functional and less focused on visuals. There are three test setups: - `TestCase::Tree` recursively creates a tree with a specified depth and branch width - `TestCase::NonUniformTree` is the same as `Tree` but omits nodes in a way that makes the tree "lean" towards one side, like this: <details> <summary></summary> 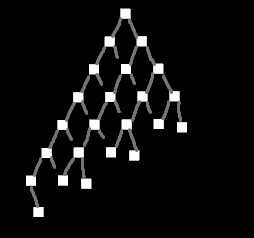 </details> - `TestCase::Humanoids` creates one or more separate hierarchies based on the structure of common humanoid rigs - this can both insert `active` and `inactive` instances of the human rig It's possible to parameterize which parts of the hierarchy get updated (transform change) and which remain unchanged. This is based on @james7132 suggestion: There's a probability to decide which entities should remain static. On top of that these changes can be limited to a certain range in the hierarchy (min_depth..max_depth).
{kind=link}
## Objective There recently was a discussion on Discord about a possible test case for stress-testing transform hierarchies. ## Solution Create a test case for stress testing transform propagation. *Edit:* I have scrapped my previous example and built something more functional and less focused on visuals. There are three test setups: - `TestCase::Tree` recursively creates a tree with a specified depth and branch width - `TestCase::NonUniformTree` is the same as `Tree` but omits nodes in a way that makes the tree "lean" towards one side, like this: <details> <summary></summary>  </details> - `TestCase::Humanoids` creates one or more separate hierarchies based on the structure of common humanoid rigs - this can both insert `active` and `inactive` instances of the human rig It's possible to parameterize which parts of the hierarchy get updated (transform change) and which remain unchanged. This is based on @james7132 suggestion: There's a probability to decide which entities should remain static. On top of that these changes can be limited to a certain range in the hierarchy (min_depth..max_depth).
## Objective There recently was a discussion on Discord about a possible test case for stress-testing transform hierarchies. ## Solution Create a test case for stress testing transform propagation. *Edit:* I have scrapped my previous example and built something more functional and less focused on visuals. There are three test setups: - `TestCase::Tree` recursively creates a tree with a specified depth and branch width - `TestCase::NonUniformTree` is the same as `Tree` but omits nodes in a way that makes the tree "lean" towards one side, like this: <details> <summary></summary>  </details> - `TestCase::Humanoids` creates one or more separate hierarchies based on the structure of common humanoid rigs - this can both insert `active` and `inactive` instances of the human rig It's possible to parameterize which parts of the hierarchy get updated (transform change) and which remain unchanged. This is based on @james7132 suggestion: There's a probability to decide which entities should remain static. On top of that these changes can be limited to a certain range in the hierarchy (min_depth..max_depth).
Objective
There recently was a discussion on Discord about a possible test case for stress-testing transform hierarchies.
Solution
Create a test case for stress testing transform propagation.
Edit: I have scrapped my previous example and built something more functional and less focused on visuals.
There are three test setups:
TestCase::Treerecursively creates a tree with a specified depth and branch widthTestCase::NonUniformTreeis the same asTreebut omits nodes in a way that makes the tree "lean" towards one side, like this:TestCase::Humanoidscreates one or more separate hierarchies based on the structure of common humanoid rigsactiveandinactiveinstances of the human rigIt's possible to parameterize which parts of the hierarchy get updated (transform change) and which remain unchanged. This is based on @james7132 suggestion:
There's a probability to decide which entities should remain static. On top of that these changes can be limited to a certain range in the hierarchy (min_depth..max_depth).