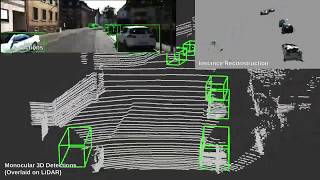
Monocular 3D Object Detection Leveraging Accurate Proposals and Shape Reconstruction
Jason Ku*, Alex D. Pon*, Steven L. Waslander (*Equal Contribution)
This repository contains the public release of the Tensorflow implementation of Monocular 3D Object Detection Leveraging Accurate Proposals and Shape Reconstruction in CVPR 2019.
Demo video showing results on several KITTI sequences.
Implemented and tested on Ubuntu 16.04 with Python 3.5 and Tensorflow 1.8.0.
Clone this repo
git clone [email protected]:kujason/monopsr.git
Install Python dependencies
cd monopsr
pip3 install -r requirements.txt
Add monopsr/src to your PYTHONPATH
# For virtualenvwrapper users
add2virtualenv src/.
Compile the two custom TF ops src/tf_ops/nn_distance and src/tf_ops/approxmatch by running the shell scripts found in the respective folders. The location of your TensorFlow python package is passed as an argument.
For example:
sh src/tf_ops/approxmatch/tf_approxmatch_compile.sh ${HOME}/.virtualenvs/{monopsr}/lib/python3.5/site-packages/tensorflow
sh src/tf_ops/nn_distance/tf_nndistance_compile.sh ${HOME}/.virtualenvs/{monopsr}/lib/python3.5/site-packages/tensorflow
To train on the KITTI Object Detection Dataset:
Download the data and place it in your home folder at ~/Kitti/object.
Go here and download the train.txt, val.txt and trainval.txt splits into ~/Kitti/object.
/home/$USER/Kitti
object
testing
training
calib
image_2
label_2
velodyne
train.txt
trainval.txt
val.txt
Download the MSCNN 2D detections here and place it in
monopsr/data/detections/mscnn
Generate the ground truth depth maps and instance segmentation:
python demos/depth_completion/save_lidar_depth_maps.py
python demos/instances/gen_instance_masks.py
Place the depth maps and segmentation outputs in ~/Kitti/object/training/.
/home/$USER/Kitti
object
testing
training
calib
*depth_2_multiscale
image_2
*instance_2_multiscale
label_2
velodyne
train.txt
val.txt
* denotes generated folders
Download the pre-trained ResNet-101 model (faster_rcnn_resnet101_kitti) from the Tensorflow Object Detection API here, and extract it in data/pretrained as data/pretrained/faster_rcnn_resnet101_kitti_2018_01_28
A sample configuration for training is in src/monopsr/configs. You can train using the example configs, or modify an existing configuration.
To start training, run the following:
python src/monopsr/experiments/run_training.py --config_path='src/monopsr/configs/monopsr_model_000.yaml'
To start evaluation, run the following:
python src/monopsr/experiments/run_evaluation.py --config_path='src/monopsr/configs/monopsr_model_000.yaml'
Note, we primarily use this script to determine metrics on the centroid and point cloud
estimation. This is not used to obtain the validation results in the paper since it uses some
ground truth boxes. To get the validation results in the paper we use run_inference.py.
To start inference, run the following:
python src/monopsr/experiments/run_inference.py --config_path='src/monopsr/configs/monopsr_model_000
.yaml' --default_ckpt_num='100000' --data_split='val'
To calculate AP performance, follow the instructions in scripts/offline_eval/kitti_native_eval
Please contact [email protected] or [email protected] for any questions or issues.