Help needed on rmf_obstacle_laserscan_detector #9
Comments
|
The obstacle detector is reporting the pose of the object wrt to frame |
|
Hi @Yadunund I have tried adding the rmf_obstacle_detector_laserscan/src/LaserscanDetector.cpp rmf_obstacle_msgs/msg/Obstacles.msg Could this be the root cause to this issue? Best, |


|
Hi @Yadunund I try to ament the code by adding one line However, on the rviz, neither lane closure shown nor rerouting happen. Best |


|
Please avoid pasting screenshots of texts. It's better if you can copy paste the text directly here or best if you can paste the text into a gist and share the link. Looks like this implementation of the detectors has not been updated since that Let me know if that works. |
|
Hi @Yadunund Yes, after adding this line of code But still, neither lane closure nor rerouting of path happen or shown in RVIZ. I checked the rqt node_graph and found my current linkage between as following Lane_blocker has 3 inputs: Anything i missed to have the lane_blocker to publish msg to this topic Best |
|
I'm not seeing any obstacle visualized in rviz. You should see a green marker that represents the obstacle if detected correctly and the frame transforms exist. Maybe before running |
|
Hi @Yadunund Originally, I couldn't get the green marker shown by Regarding the obstacle_visualizer_node that suppose to publish the obstacles to I found that this only happens if rmf_visualization_obstacles package is installed via Best |
|
Hi @Yadunund Although i am able to have the green marker shown on RVIZ for the obstacles detected. But the closing of the lane will only stay for short period, and then it will auto re-open again even though the same obstacles are still there. Any idea, what parameters shall i modify for lane_blocker_node ? Couldn't find any ReadME regarding the parameters used for lane_blocker_node. I have tried to adjust the Best, |
|
Hi, Having similar issues. In my case the obstacle detection works, until I replace the existing messages by the ones recommended by @Yadunund MESSAGES. I replaced without issues the rmf_visualization package without issues, but if I add those messages, even without compiling the Any ideas on how this can be setup to make it work, because its a pitty that its doesn't work for what it seems some kind of inpatibility obstacle detector? |
|
Hi. @HappySamuel i have similar issues. first, i can't have the green marker shown on RVIZ for the obstacles detected. how do you that? I see the READMD. but hint is not comment. i try the simulation of rmf_demos office.launch.xml and I just place unit_BOX in gazebo but there are no visualization in RVIZ (no green marker..) |
Hi
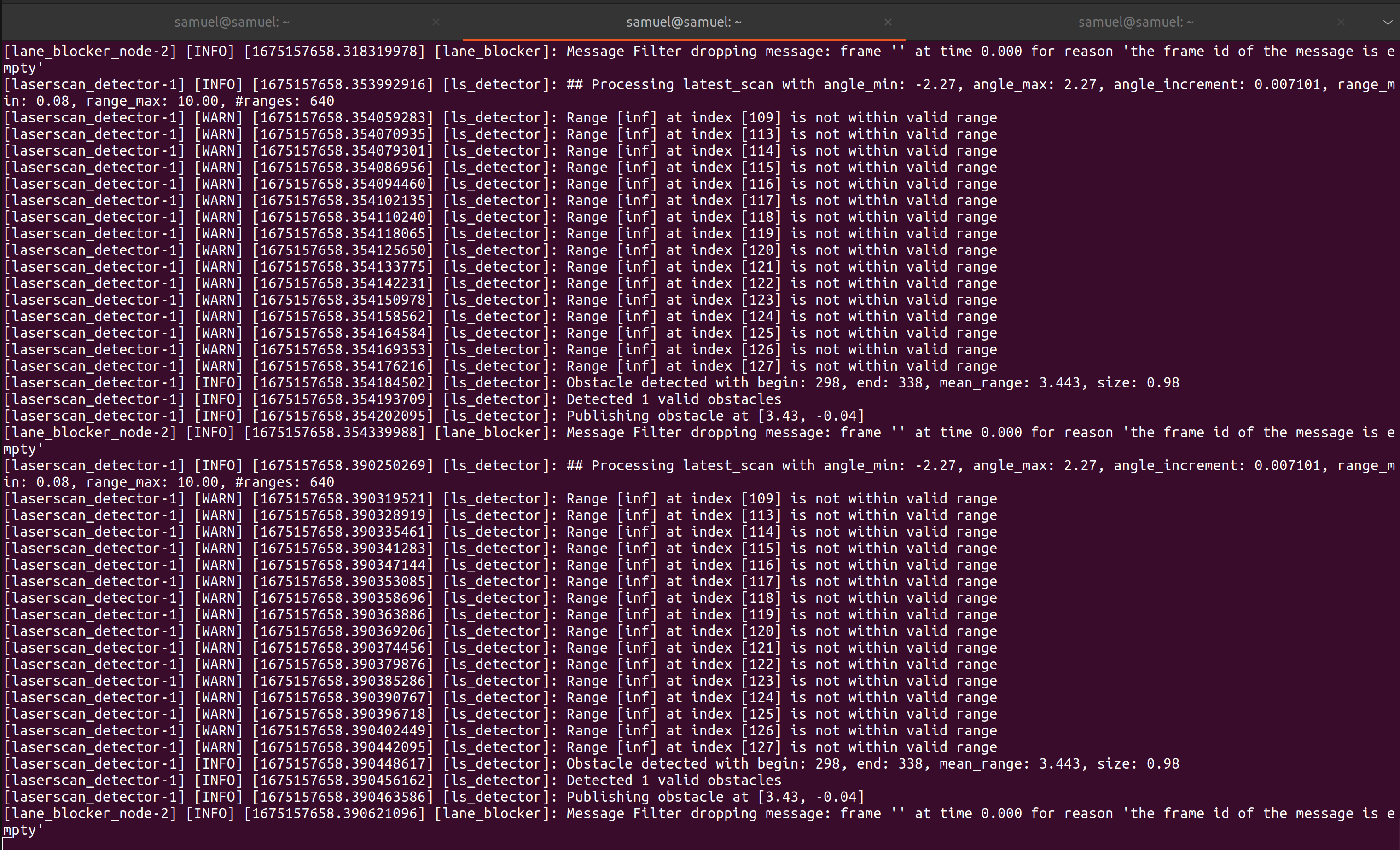
I managed to have everything compiled, it shown hooked up on rqt node_graph. However when i place an obstacle in front of laserscanner, it complaints about no frame_id for header when being subscribed into
lane_blockernode.Complaint message from Lane Blocker
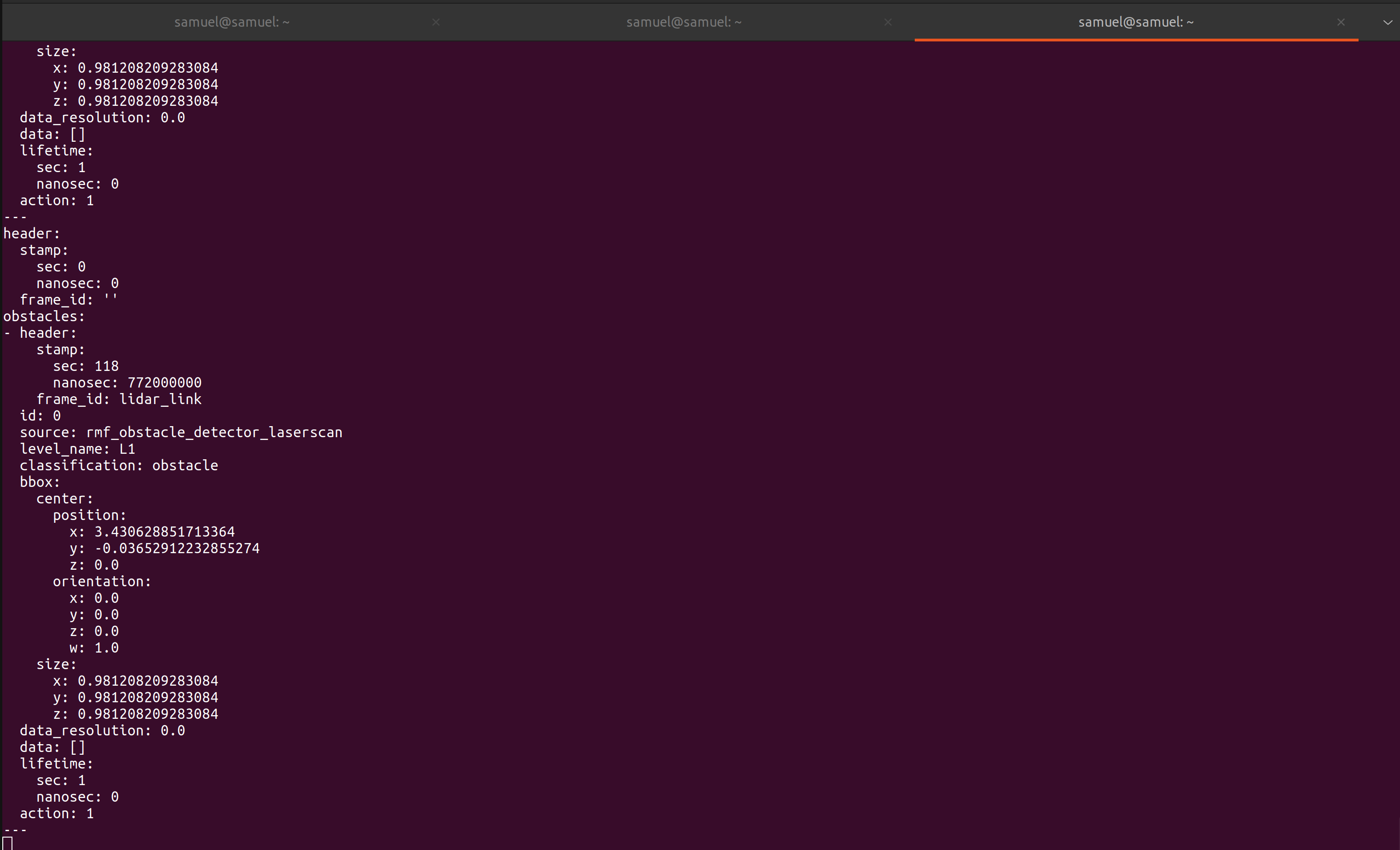
ROS2 topic echo of /rmf_obstacles
Launch File settings
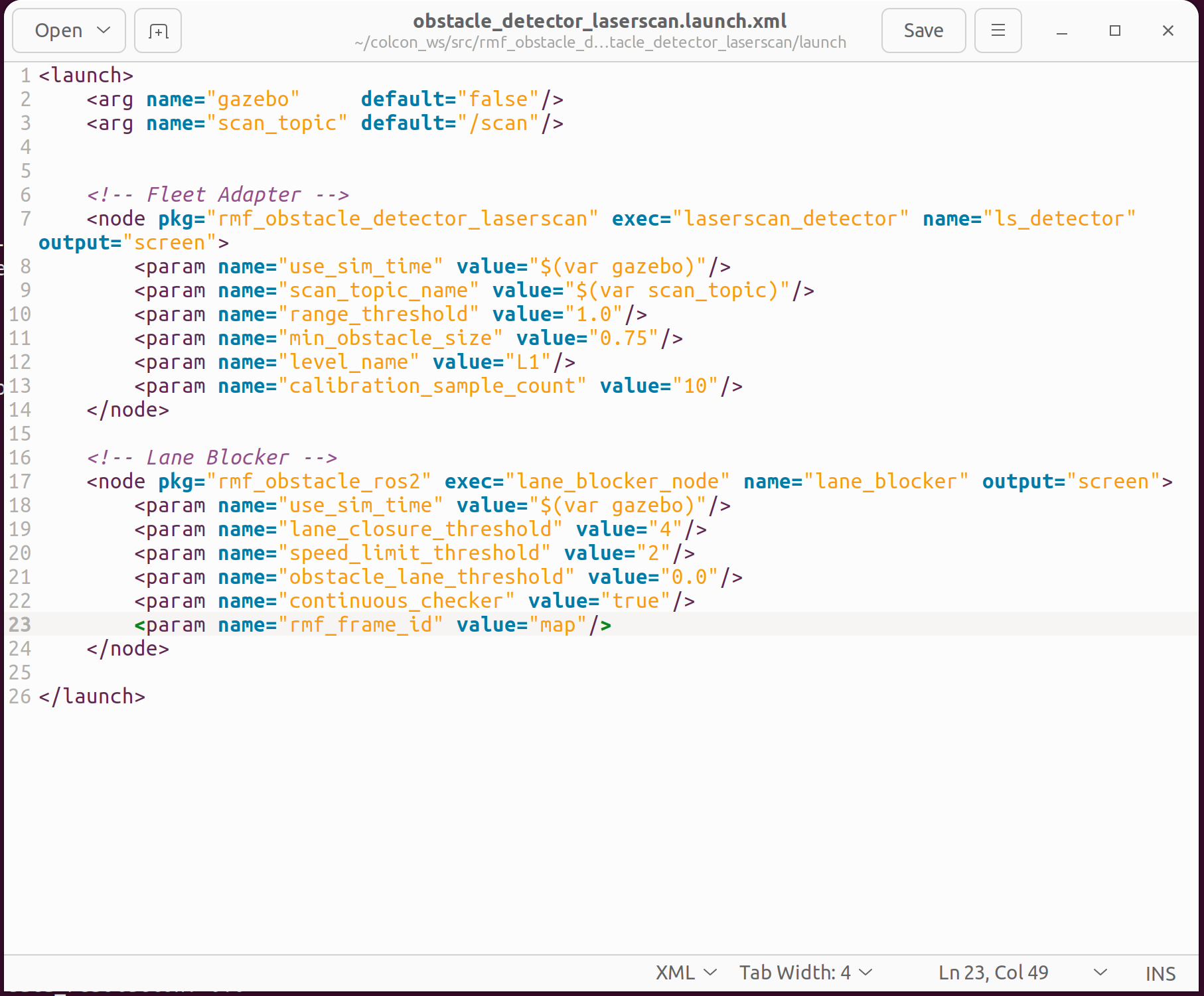
How shall i fill the frame_id for header msg of topic /rmf_obstacles ?
Best,
Samuel
The text was updated successfully, but these errors were encountered: