![]()
This repository will help you to set up a very simple yet powerful xy-stage for your UC2-based microscope experiments, where manipulating the region of interest (ROI) in X/Y at a micrometer level using NEMA stepper motors becomes important.
The electronics are based on the GRBL-firmware and can be controlled either through an Arduino Shield (e.g. CNC Shield v3) controlled by a Raspberry Pi/Nvidia Jetson/laptop or a dedicated CNC/3D printing electronics (e.g. MKS CLS). Curious to see what this looks like? Keep scrolling!

This stage can be used for diffrent experiments. We have successfully used it for Ptychography, where micrometer stage manipulation is of importance. Similarly, we use it for autonomously operating fluorescence microscopes. A complete tutorial can be found in the core UC2 repository
Depending on the settings of the GRBL-controller you can achieve <1µm resolution with the stage! Adding an additional optical encoder by means of a camera (e.g. Raspicam) + microscope objective lens, the open-loop stage can be used as a closed-loop stage with very high precision. More about this will follow soon!
The overall price is in the range under 300€.
The stage on top of a fluorescence microscope:

Features:
- Move samples plate in XY at high resolution
- NEMA11-based mechanism
- Fast scanning
- Very precise
- Whole setup <300€ in parts
- Easy to assemble
- Limited number of parts (3D printed + off-the-shelf components)
- Minimum of tools required
- Use GRBL as the motion protocol
You can directly control the microscope from the Opentrons Jupyter notebook. We have collected some notebooks showing its control in the folder ./PYTHON. This way it becomes very simple to plan experiments which involve both, pipetting and imaging.

We offer different ways to control the stage!
Warning: This is still under strong development. We derived the software to control the GRBL-based XYZt stage from the Openflexure microscope project by Bowman et al. Instead of using a Raspberry Pi camera, we use an Nvidia Jetson Nano singleboard computer and run a customized version of the OFM server that can control the GRBL board and the monochrome CMOS camera.
A detailed set of instructions for installing the Openflexure Server (OFM Server) will be found in a dedicated README_SOFTWARE.md (it is under construction...). In case you want a preinstalled image, please contact us!
We have written a small device adapter for the Octopi research developed for the SQUID project from the PrakashLab. Please have a look in this repository
We also provide a small code example for driving the code using a python driver. Please refer to the Jupyter Notebook and the package in the folder PYTHON.
Below we describe how the XY Stage can be build and assembled in order to replicate the whole system as shown in the rendering above. One needs additional parts that can be found in the original openUC2 repository.
Below you will find all components necessary to build this device
All these files need to be printed. We used a Prusa i3 MK3 using PLA Prusament (Galaxy Black) at layer height 0.3 mm and infill 80%.
| Type | Details | Price | Link |
|---|---|---|---|
| Sample Holder | (optional) Sample holder with lowered base which adapts to XY stage | 0.04 € | Assembly_XY_stage_with_motors_v3_cellSTORM_UC2_Sample_arm_ptycho.stl |
| Sample Holde | Sample holder with staight base which adapts to XY stage | 4 € | Assembly_XY_stage_with_motors_v3_30_XY_Sample_arm_v3.stl |
| Baseplate | Adapts the XY-stage to the UC2 cubes | 4 € | Assembly_XY_stage_with_motors_v3_cellSTORM_UC2_Laser_base.stl |
| Motor mount | Adapts the motor to the stage | 4 € | Assembly_XY_stage_with_motors_v3_30_Mount_Nema_Motor_attachement_for_XYstage_v3.stl |
| Gear 2 | Gear for micrometer screw | 4 € | Assembly_XY_stage_with_motors_v3_cellSTORM_UC2_motorized_micrometer_gear2_1.stl |
| Gear 1 | Gear for motor | 4 € | Assembly_XY_stage_with_motors_v3_cellSTORM_UC2_motorized_micrometer_gear1_2.stl |
We tested many different variants, where many were not really reproducible by means of whole positions and linear guiding quality. Finally we decided to buy a couple of these stages and are very happy with them!
The XY60-C costs between 40-50€ and compares to a Thorlabs LX20stage (820€).
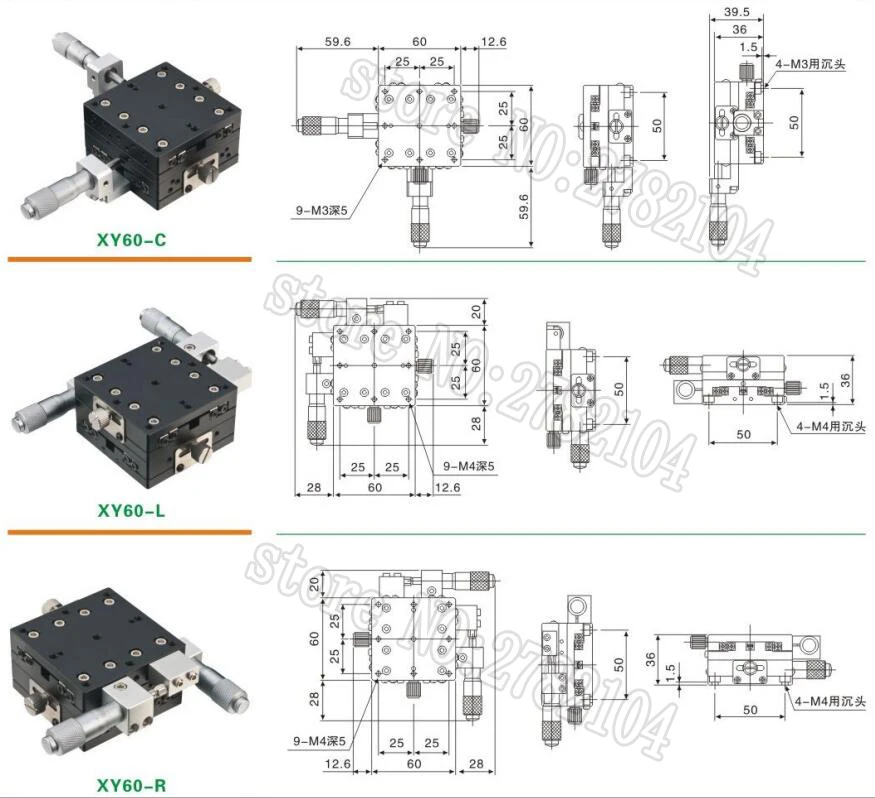
It is available from this Aliexpress shop. Search for "XY Axis 60*60mm Trimming Station Manual Displacement Platform Linear Stage Sliding Table XY60-C XY60-R,XY60-LM LY60 Cross Rail"
From the website the following information is available:
Feature:
1. Using mobile cross roller guides, enabling high-precision, smooth
2. The main body made of aluminum alloy, light weight, suitable to be built for other devices
Parameter:
1. Direction of movement: X Y axis direction
2. Body material: Aluminium
3. Drive: differential head
4. The table size: 60x60mm
5. Table thickness: 36mm/30mm
6. Stroke: ± 6.5mm(Customizable ±12.5,if you need,contact us)
7. Load: 49N (5kgf)
8. Minimum scale: 0.01mm
9. Accuracy class: 0.01mm
10. Parallelism: 0.06mm
11. Weight: 0.48kg
This is used in the current version of the setup
| Type | Details | Price | Link |
|---|---|---|---|
| MKS DLC CNC (NEMA Motors) | Controller Electronics for NEMA motors and Laser | 25 € | Roboter-Baukasten |
| M3, M4 Screws | Screw Set | 12 € | Ebay |
| yourDroid Netzteil 12V 3A 5,5x2,1mm DC-Stecker | Power Supply 12V | 6,45 € | Roboter-Baukasten |
| 3x A4988 Schrittmotorentreiber RBS10232 | Stepper Driver | 0,99 € | Roboter-Baukasten |
| Spring | Diameter: 5mm, 15mm long | 0,99 € | Roboter-Baukasten |
| Nema11 Motor | Steppermotor | 23 € | Eckstein |
1. These are the parts needed for the XY-stage

2. Start by removing the micrometre with the screws for one axis

3. Try to add something which blocks the rail from snapping back (e.g. screwdriver)

4. Add the micrometer screw to the motor adapter ad add a screw at a side to mount it (M3x8mm)

5. Add the motor to the adapter

5.1 (optional) Add M3 screws to have a better mounting of the motor

6. Mount the gears

6.1 Fix the gears with screws (M3 - headless)

7. Mount the assembly back on the XY-stage with the M2.5 screws

7.1 Does it look like this?

8. Repeat it for the second axis and mount the sample adapter (M4)

9. (optional) Add the printed baseplate to the XY-stage - then screw the UC2 puzzle-piece baseplates to the printed baseplate of the XY-stage


Some results will show up here soon.

Fig 1. Fluorescent cells (HeLa) moved in XY/Z This is actually a very bad example ;-)

Fig 2. Ptychography measurements of a USAF chart scanned through a beam
This project is open so that anyone can get involved. You don't even have to learn CAD designing or programming. Find ways you can contribute in CONTRIBUTING
This project is open-source and is released under the CERN open hardware license. Our aim is to make the kits commercially available. We encourage everyone who is using our Toolbox to share their results and ideas, so that the Toolbox keeps improving. It should serve as a easy-to-use and easy-to-access general purpose building block solution for the area of STEAM education. All the design files are generally for free, but we would like to hear from you how is it going.
You're free to fork the project and enhance it. If you have any suggestions to improve it or add any additional functions make a pull-request or file an issue.
Please find the type of licenses here
REMARK: All files have been designed using Autodesk Inventor 2019 (EDUCATION)
If you find this project useful, please like this repository, follow us on Twitter and cite the webpage! :-)