
This project explores human controlled robotics. A robotic arm is controlled in real-time using 5 finger gestures on a force-sensitive touch interface.
This project was created for two reasons: First, is to evaluate Sensel’s new force-sensitive touch interface. Second, is the exploration of a magical sensation; The use of touch gestures to animate a robot.
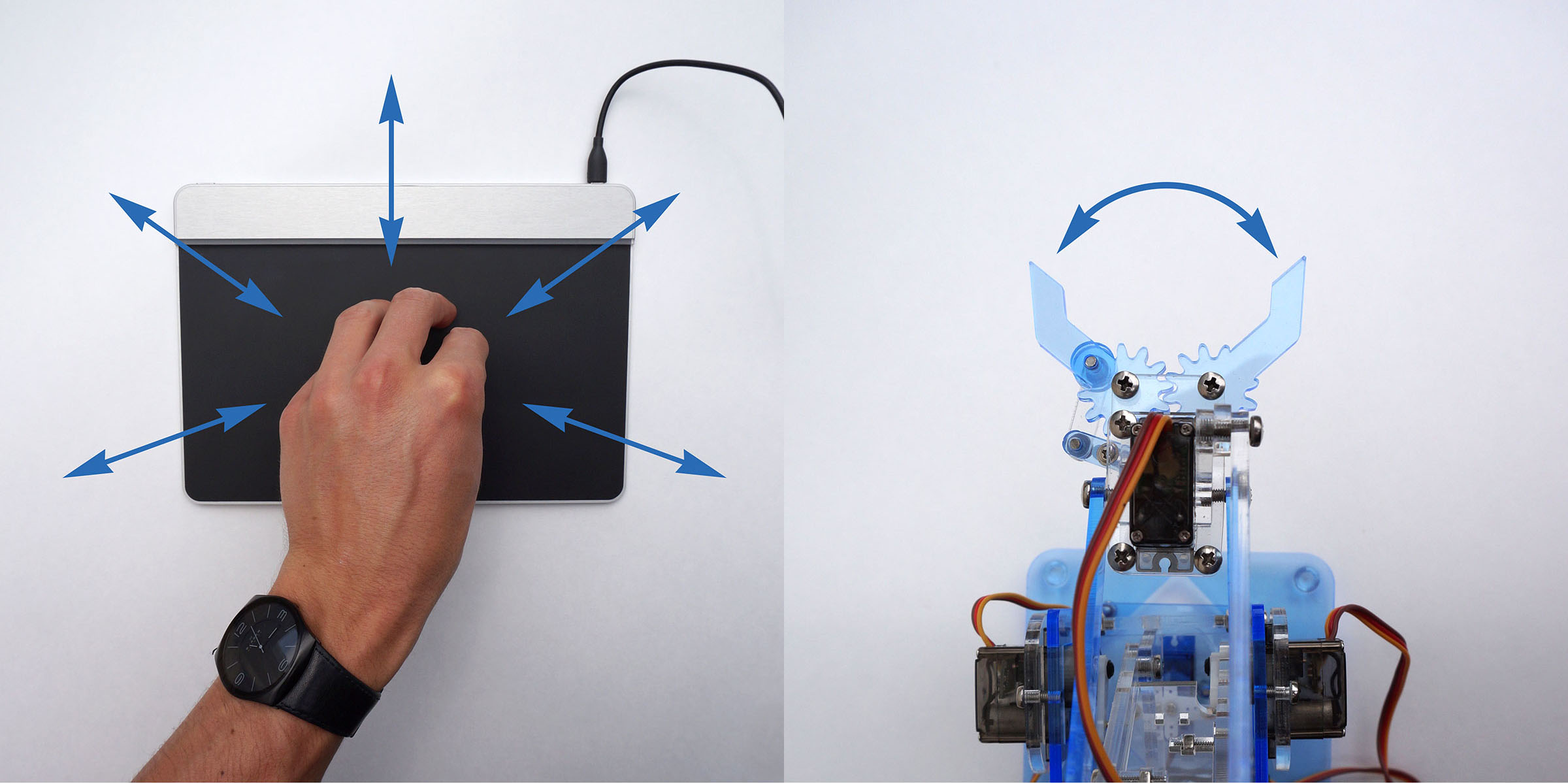
There are 4 hand gestures that control the robot arm’s movements:
Force down:

Rotation:

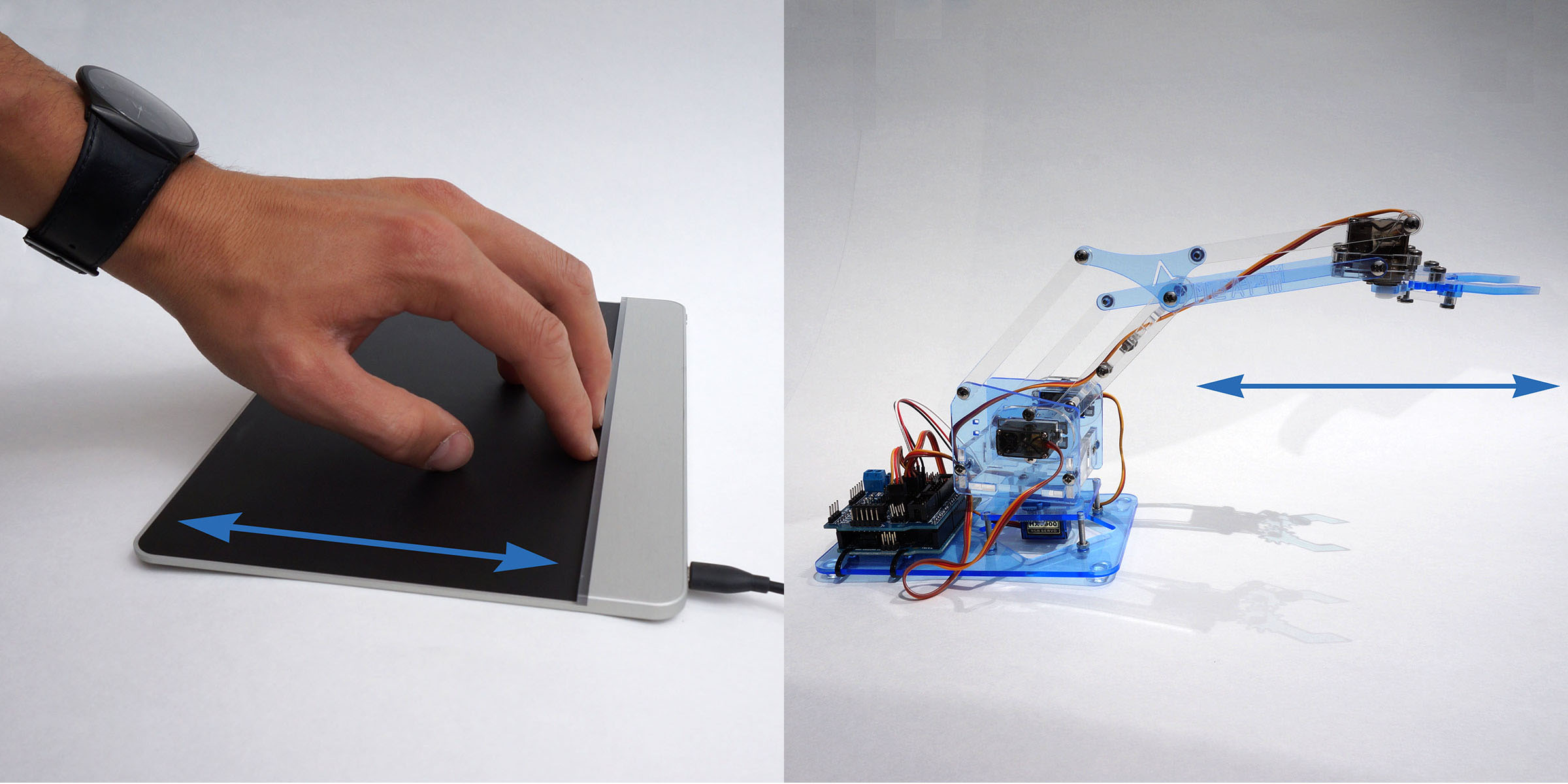
Pinch:
Forward / Backward:
To make this project happen, the following items were used:
- Sensel touch interface (http://www.sensel.com/)
- MeArm robot arm (http://www.thingiverse.com/thing:360108)
- Arduino Uno (https://www.sparkfun.com/products/11021)
- Servo “shield” for Arduino (http://www.sainsmart.com/sainsmart-sensor-shield-v5-4-arduino-apc220-bluetooth-analog-module-servo-motor.html
You can get this project up and running in no time! The code is located here: https://github.com/raykamp/GestureControlledRobotArm
First, program the Arduino with the “sketch” code. Next, run the Processing application, and control the robot with 5 fingers!